
Kétszabadságfokú robusztus szabályozó tervezése és validálása egzakt linearizálható mechatronikai rendszerhez
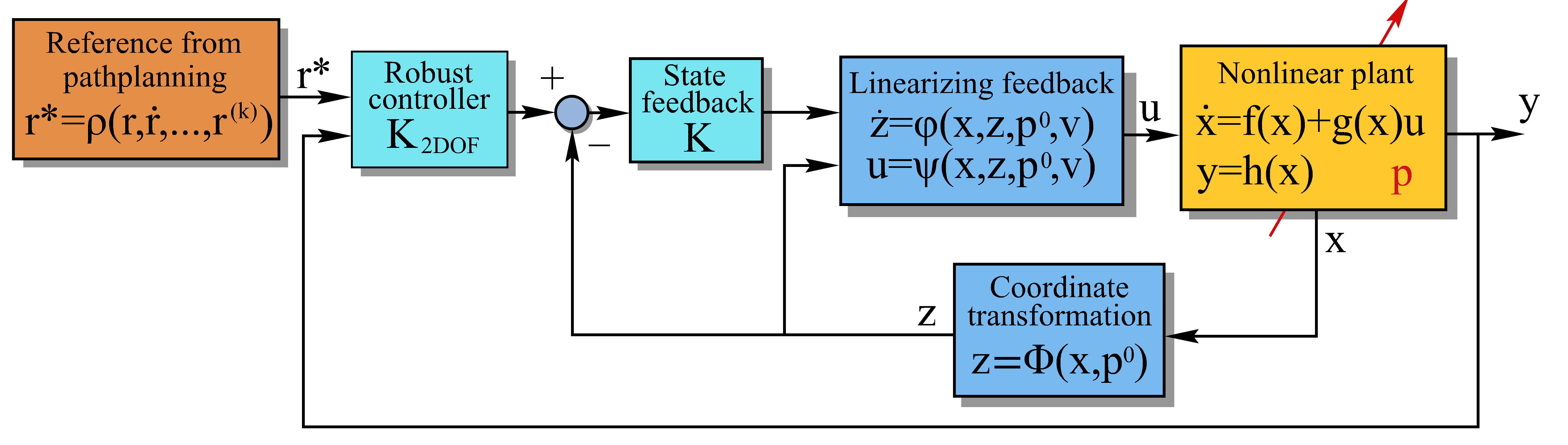
A nemlineáris rendszerek irányításánál elterjedt módszerek egyike az úgynevezett egzakt linearizáció. Ez a módszer nemlineáris rendszerek bizonyos osztályainak irányításához egy statikus vagy dinamikus állapotvisszacsatolást és egy koordináta-transzformációt alkalmaz, hogy az így kapott zárt kör dinamikája lineáris, amely tehát jól kezelhető klasszikus szabályozástechnikai eszközökkel.
Az egzakt linearizációhoz azonban szükség van az irányítandó rendszer dinamikáját az elvárt működési tartományban megbízhatóan leíró matematikai modellre és az abban szereplő paraméterek megfelelő pontosságú értékeinek ismeretére, melyek működés közben akár változhatnak is. A modell és paramétereinek ismerete nélkül a zárt körnek nem csak a performanciája, hanem a stabilitása sem garantálható. Ráadásul az irányított fizikai rendszerekre külső zavarások hatnak (pl. mechanikai rendszernél a súrlódás, terhelésváltozás) és a méréseket zaj terhelheti. A dolgozat egy olyan módszert mutat be, amellyel biztosítható a vizsgált, egzakt linearizálható rendszerek stabilitásának és performanicájának robusztussága a paraméter bizonytalanságokkal, külső zavarásokkal és zajokkal szemben.
A dolgozat röviden áttekinti a kidolgozott módszer ismertetéséhez szükséges elméleti hátteret és jelölésrendszert. Bemutatásra kerül a javasolt, kaszkád szabályozási architektúra és a külső visszacsatolásban található, robusztus működést biztosító szabályozó átvitelét meghatározó tervezés folyamata. A módszer egyaránt alkalmas soros és kétszabadságfokú robusztus szabályozók tervezésére, az utóbbi esetén jobb zavarelnyomási tulajdonságok biztosíthatók..
A tervezési módszer alkalmazhatóságát a dolgozat mechanikai rendszerekhez mutatja be. A szimulációk igazolták a performancia és a stabilitás robusztusságát, továbbá az IIT tanszék laboratóriumában található kétszabadságfokú robotkaron történt implementációnak köszönhetően valós, fizikai rendszeren végzett vizsgálatok is bizonyították a tervezett szabályozó előnyeit és alkalmazhatóságát.
szerző
-
Finta Barnabás
Mechatronikai mérnöki mesterképzési szak
mesterképzés (MA/MSc)

konzulens
-
Dr. Kiss Bálint
docens, Irányítástechnika és Informatika Tanszék

helyezés
Continental Automotive Hungary Kft I. helyezett