
Pályatervezés dinamikus környezetben navigáló autonóm drónok számára
Kutatásom célja egy kis számításigényű, elosztott pályatervezési algoritmus kifejlesztése autonóm drónok számára, rögzített és mozgó akadályokkal zsúfolt térben történő gyors és biztonságos navigáció megvalósítására. Az eljárás lehetséges alkalmazási területe gyártórendszerek monitorozása, városi környezetben történő navigáció, illetve felderítési és mentési feladatok támogatása.
A tervezés kezdő lépése egy tervezési gráf létrehozása kizárólag a statikus objektumok figyelembe vételével. A drónok egyedi pályáinak megtervezése ezután kezdődik. A dolgozat első felében feltételezzük, hogy a mozgó objektumok pályája előre ismert. A drónok egymás után, előre meghatározott sorrendben tervezik a pályájukat, minden drón a sorrendben előtte állókat mozgó objektumnak tekinti. Minden drón két fő tervezési lépést hajt végre: elsőként, konstans pályamenti sebességet feltételezve egy módosított, idővel paraméterezett gráfkereső algoritmus (A*, Dijkstra) felhasználásával minimális idő alatt bejárható utat keres a kiindulási és a célpont között. A keresést több, előre rögzített pályamenti sebességre párhuzamosan futtatjuk le. A konstans sebesség feltételezése azért lényeges, mert így a keresés kis számítási idővel végrehajtható. Ugyanakkor, épp emiatt előfordulhat, hogy a vizsgált fix sebességértékek mellett nem létezik ütközésmentes útvonal. Ennek elkerülésére a keresés során megengedjük az ütközést, de alkalmas súlyfüggvény megválasztásával büntetjük. Az ütközésmentes pályát a tervezés második lépésében hozzuk létre: ebben a lépésben a korábban kapott gráfútra, pontosabban az arra illesztett folytonos spline görbére alkalmas sebességprofilt tervezünk, ahol az ütközések elkerülését szigorú korlátozásként írjuk elő. Mivel a térbeli pálya már adott, ez a tervezési lépés kevert egészértékű kvadratikus optimalizálási feladatként (MIQP) írható fel, amely hatékonyan megoldható a rendelkezésre álló szoftvercsomagok (pl. Gurobi) segítségével.
A dolgozat második felében a pályatervezési eljárást továbbfejlesztjük: képessé tesszük előre nem ismert mozgású akadályok kezelésére is. Feltételezzük, hogy az ismeretlen mozgású objektumok pozíciójáról megbízható mérési adat áll rendelkezésre. Ezt felhasználva, adott időlépésenként becslést adunk az objektum jövőbeli mozgására vonatkozóan. Ha ennek ismeretében ütközés feltételezhető, az érintett kvadkopter pályáját módosítjuk. Az újratervezés a korábban megtervezett útvonal lokális megváltoztatásával történik. Ennek során először több elkerülő útvonaljelöltet hozunk létre, melyek közül a későbbi ütközés valószínűségét és a többi kvadkopter mozgását figyelembe véve választunk.
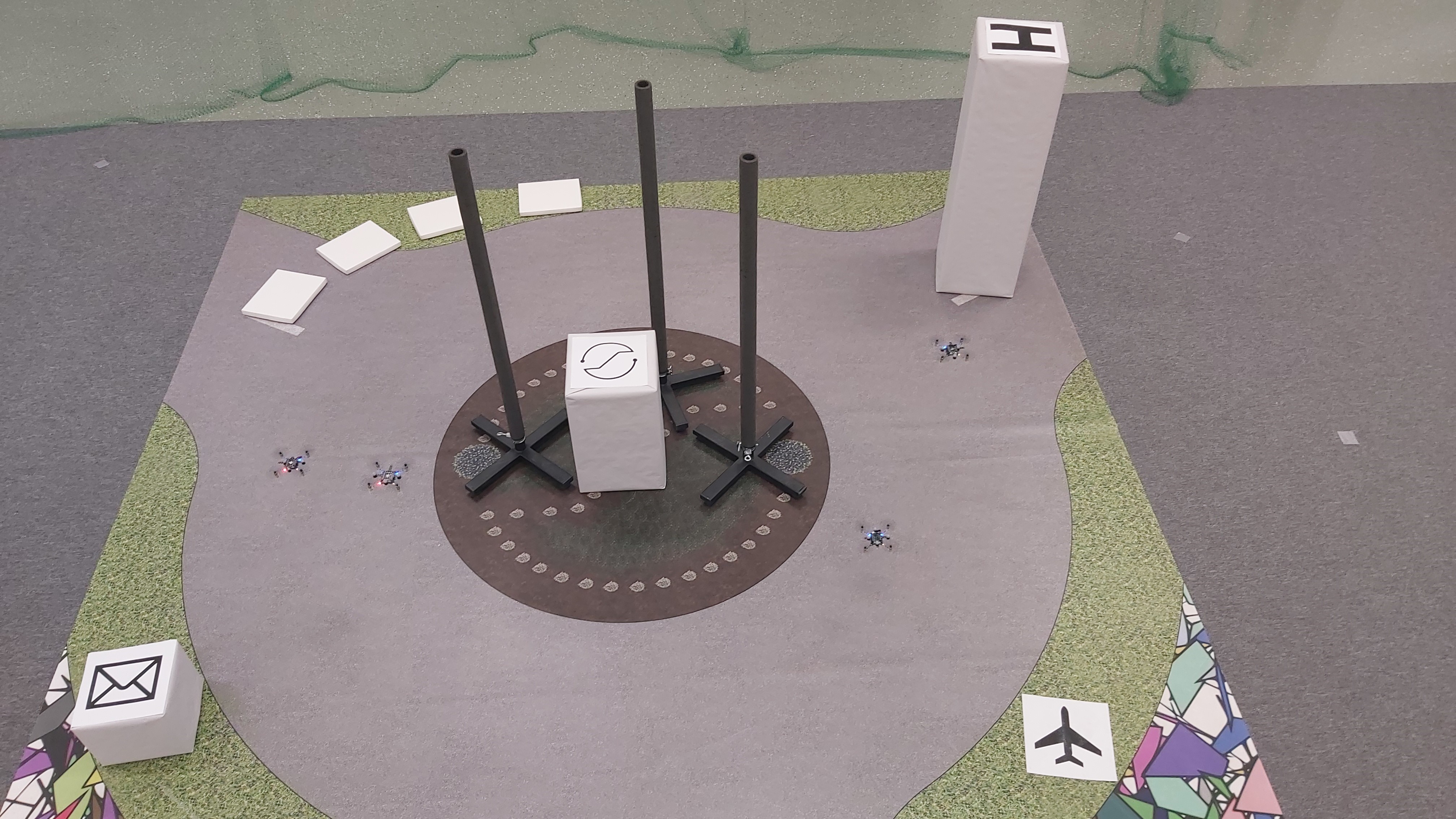
Az algoritmust Python nyelven implementáljuk, működését először MuJoCo szimulációs környezetben vizsgáljuk. Ezt követően az implementációt Bitcraze Crazyflie 2.1 miniatűr kvadkopterekre is elvégezzük, az eljárás alkalmazhatóságát valós rendszeren is teszteljük, illetve demonstráljuk.
szerző
-
Palkovits Máté
Járműmérnöki
alapképzés (BA/BSc)

konzulensek
-
Péni Tamás
tudományos főmunkatárs, Számítástechnikai és Automatizálási Kutatóintézet (külső) -
Dr. Tóth Roland
Tudományos Munkatárs, SZTAKI (külső)

