Látórendszer fejlesztése DBC-k termikus tranziens mérésautomatizálásához teljesen konvolúciós mélytanulásos neurális hálók, képfeldolgozó algoritmusok és Fa-struktúrájú Parzen Becslő használatával
A 21. század számos trendje, így a korszerű teljesítményelektronikát használó eszközök térhódítása, az autóipar nagyütemű elektrifikációja, illetve a villamosenergia-fogyasztási igények gyors növekedése miatt előreláthatólag továbbra is kiemelt fontosságú szerep hárul majd az elektronikai iparágon belül a közvetlen kötésű réz kerámia hordozók technológiájára, ugyanis kiemelt szerepük van a technológiai innovációban. Ezeknek az eszközöknek az említett tendenciák miatt, egyre nagyobb teljesítmény disszipációs sűrűséggel kell megbirkózniuk, amely jelentős hőterhelésnek teszi ki őket. Az erre a terhelésre való méretezés gyakran egy biztonságkritikus feladat, ugyanis olyan jellegű alkalmazásokba kerülnek beépítésre, mint a szervomotor, vagy az automata váltó, ahol különösen veszélyes az üzem folyamán bekövetkező meghibásodás. Ráadásul a vezető meghibásodási ok épp a hőmérséklet ebben az iparágban, ami az összes meghibásodásnak több mint a felét teszi ki. A közvetlen kötésű réz kerámia hordozók kutatás-fejlesztési fázisában a termikus vizsgálatot termikus tranziens méréssel, T3Ster méréssel lehet elvégezni. Ahhoz, hogy korszerű módon, jó minőségű hőtani modelleket lehessen alkotni az egyes elektronikai eszközökről, bizonyos termékfejlesztéshez szükséges modellidentifikációs folyamatokat érdemes robotizálni. Ezzel csökken az emberi hibafaktor hatása és növekszik az egységnyi idő alatt elvégezhető mérések száma is. Éppen ezért a T3Ster mérés automatizálása jelentős hozzáadott értékkel bír mind gazdasági, mind műszaki szempontból, mivel növeli a versenyképességet és a reprodukálhatóságot. Ez az automatizálás megspórolja a manuális alkatrészenként külön-külön történő mintapreparációt, ezzel csökkentve a humán munkaórák számát és lehetővé téve az emberi felügyelet nélküli mérést. A leírt folyamatot célszerű látórendszerrel támogatni, ugyanis ennek segítségével információt kap a mérést végző robot az egyes mérendő elektronikai eszközök ideális mérőtérbeli pozíciótól és orientációtól való eltéréséről. Így ezt az eltérést korrigálni tudja a robot, ennek következtében pedig nem fordulhatnak elő olyan esetek, hogy félbeszakad egy időigényes, biztonságkritikus rendszer ellenőrzését támogató mérési folyamat. Az alkatrészek kis méreténél fogva, a látórendszerrel szemben támasztott igény a nagy pontosságú pozíciómeghatározás. Ez legalább 0,25 mm pontos pozíció számítást és 1° pontosságú orientáció számítást igényel.
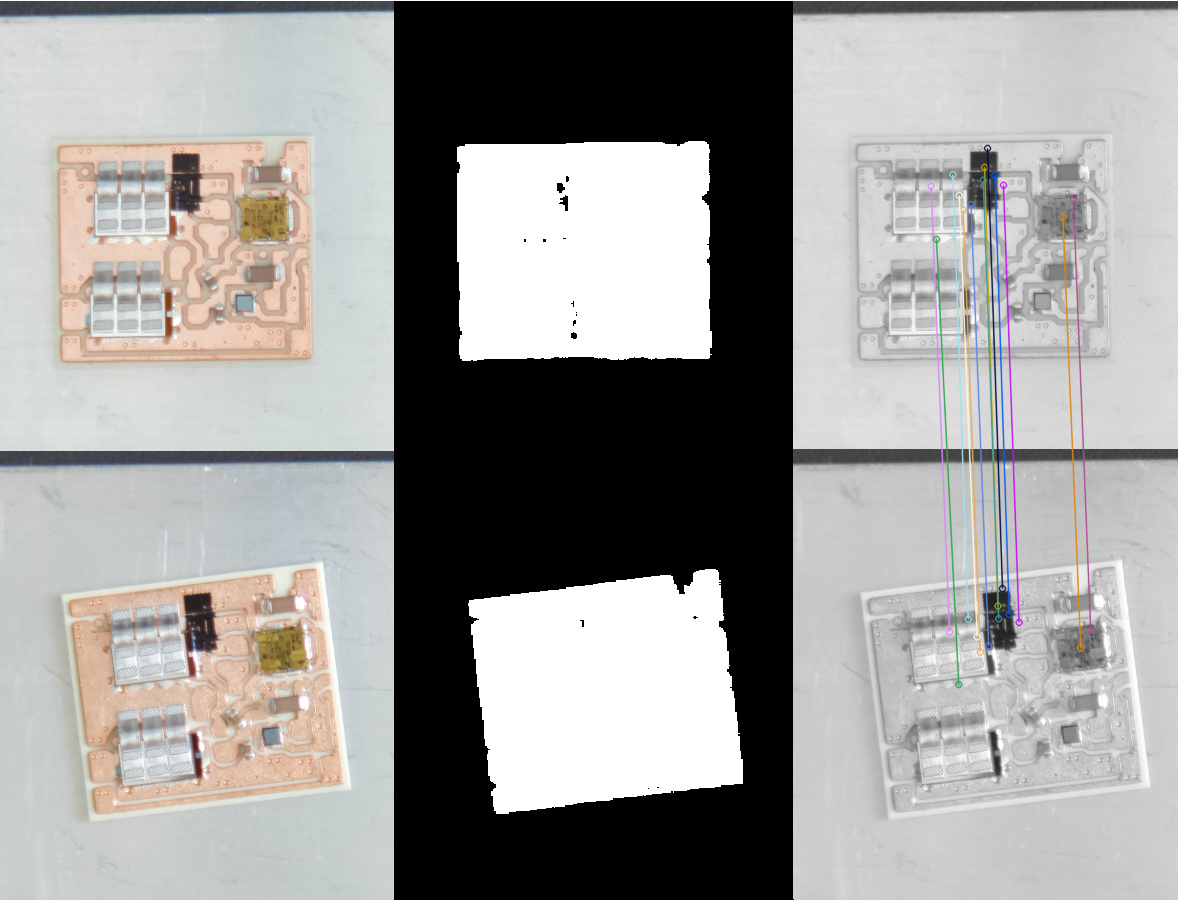
Ehhez az automatizáláshoz járultam hozzá a Robert Bosch Kft. Termikus Identifikációs Csapatában egy látórendszer fejlesztésével. Komplex rendszert dolgoztam ki, melynek egyik alapvető feladata a jó minőségű, kellő információt tartalmazó kép készítése, ugyanis ennek hiányában nehéz jó képfeldolgozó algoritmus fejleszteni. Egy jó optikai rendszer hatékonyabb kiindulópontja lehet a teljes látórendszernek. Ehhez optikát és szenzort választottam a legkisebb megfigyelni kívánt méret, a várható tárgytávolságtartomány és a látószög figyelembevételével, illetőleg munkám leghangsúlyosabb részében szoftvert fejlesztettem az automatizációhoz szükséges képi információk feldolgozásához. Több gépi tanulási algoritmust és mélytanuláson alapuló teljesen konvolúciós neurális hálót használtam. Előbbiekhez paramétereket választottam feladatspecifikusan, utóbbiakat pedig saját magam fejlesztettem. Kiemelt feladata volt munkámnak a hiperparaméterek finomhangolása. A Fa-struktúrájú Parzen Becslő segítségével megfelelő beállításokat határoztam meg a mélytanulás-alapú szemantikus szegmentáció neurális hálójának kategorikus, folytonos és diszkrét paramétereire is. Így választottam megfelelő optimalizáló algoritmust, dilatációt, batch méretet, csatornaszámot, mélységet, epoch számot, regularizációs súlyozást, tanulási rátát, valamint tanulási ráta csökkenési arányt és csökkenési lépésközt. A tanításokhoz és validációkhoz szükséges adathalmazt a méréshez is használt kiválasztott optikával és szenzorral készítettem és kézzel annotáltam. Ez összesen 422 képet jelent, melyeket 80 % - 20 % tanítás-validálás felosztással használtam fel további adat-augmentációt is alkalmazva. Összesen 12149 alkalommal tanítottam be és értékeltem ki háló-architektúrát és a legjobb konfigurációval 98,37 %-os IoU pontosságot sikerült elérnem. Ennek és az ezzel egy munkafolyamatba illesztett SIFT algoritmusnak köszönhetően robosztus, a kritériumokat teljesítő 100 μm és 0,75° pontosságú navigációra alkalmas látórendszert sikerült készítenem. Szakirodalmi vizsgálataim során nem találtam olyan munkát, amely ilyen nagy pontossággal valósított volna meg szemantikus szegmentációt és navigációt közvetlen kötésű réz kerámia hordozók esetén. Így munkám alkalmazható a jövőben új ipari projektekhez, fejlesztésekhez. Továbbá újszerű megoldásnak számít a Fa-struktúrájú Parzen Becslő, a teljesen konvolúciós szemantikus szegmentációt végző neurális háló és a SIFT algoritmus együttes használata, melyekkel a felsorolt eredményeket elértem.