Hatszabadságfokú Armdroid robotkar felújítása és vezérlése Labview-val
Napjainkban a robotmanipulátorok, azon belül is az emberi karhoz hasonló robotkarok térnyerése egyre jelentősebb. Alkalmazásuk azokon a területeken a legszembetűnőbb, ahol egyes automatizált mozgások megvalósításához több szabadságfokra, nagy pontosságra, illetve ismétlődő, monoton feladatok elvégzésére van szükség.
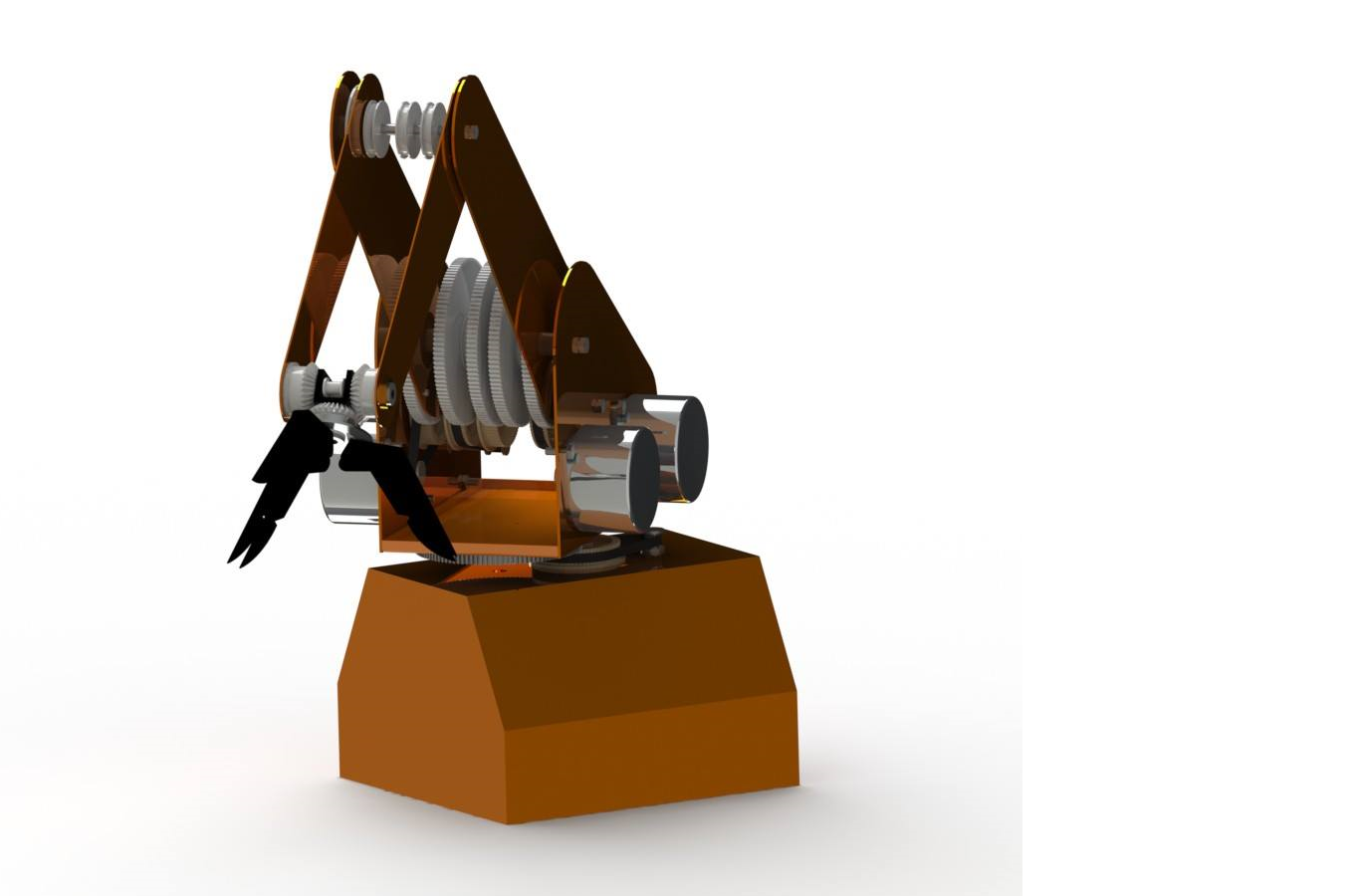
A dolgozatban szereplő hatszabadságfokú robotkar egy Armdroid típusú robot, amit a Colne Robotics Ltd. cég gyártott körülbelül 30 évvel ezelőtt. A projekt során elsődleges célunk a robotkar újraélesztésével egy olyan demonstrációs, illetve oktatási célokra alkalmas kar fejlesztése volt, mely a későbbiekben elősegítheti a robotprogramozás kinematikai és vezérlési problémáinak megértését gyakorlati úton is, akár interneten keresztül történő mérés útján.
A hajtásláncban szíj-, kötél- és fogaskerékhajtás is található, ezek egyes elemei működésképtelen állapotban voltak. Az eredeti alkatrészek javítását ragasztással és 3D nyomtatással oldottuk meg. Az elektronikát tartalmazó NYÁK sem működött, emiatt új NYÁKot terveztünk és gyártottunk le. A NYÁK tartalmazza a hatféle mozgáshoz tartozó léptetőmotorok működéshez szükséges áramköröket. A motorok szabályozása során az effektor pozíciójának és orientációjának meghatározásához úgynevezett direkt és inverz kinematikai feladatokat oldottunk meg.
Az adatok feldolgozását ARM típusú mikrokontrollerrel végeztük, ami a vezérlő jeleket soros porti kommunikáció során kapja meg a Labview interfésztől. Az általunk fejlesztett algoritmus lehetővé teszi a kar manuális vezérlését, továbbá a kar munkaterében lévő előre megadott P(x,y,z) pont null pozícióból való elérését. Ezt kiegészítve a kar képes az effektor pozícióba állítását lineáris interpolációval is elérni.
A dolgozatunkban a robot tervezési fázisait részletezzük, kitérve a tervezés során előforduló problémákra és azokra adott megoldásokra. Bemutatjuk a kinematikai modellt és ismertetésre kerül a Labview program is. A dolgozat a tovább fejlesztési lehetőségek bemutatásával zárul.