Pneumatiku munkahenger PID szabályozásának stabilitása
Pneumatikus munkahenger PID szabályozásának stabilitása
Tolner Ferenc MSc. II. évf.
e-mail: tolnerfeco@gmail.com
Konzulens: Dr. Hős Csaba, Hidrodinamikai Rendszerek Tanszék
e-mail: hoscsaba@hds.bme.hu
A hagyományos pneumatikus munkahengerek jellemzően PID szabályozókkal vannak felszerelve, illetve ezen kontrollerekkel történik a vezérlésük. Ezek a szabályozók azonban lineáris rendszerekre lettek kifejlesztve és nem veszik figyelembe az olyan nemlinearitásokat, mint pl.: holtsáv (szabályozószelep), tapadó-csúszó súrlódás vagy a digitális mintavételezésből adódó időkésés.
Az ún. nem-folytonos hatások viszont alkalmatlanná tehetik a hagyományos stabilitás vizsgálati módszereket. Ezek arra épülnek, hogy a rendszert leíró egyenletek folytonosan differenciálhatóak. Az egyenletink viszont gyakran az adott értelmezési tartományon szakaszosan, „kapcsos-módon” vannak megadva. Ezért szükséges az egyenletek és egyenletrendszerek szakaszonként történő vizsgálata, valamint az ehhez szükséges matematikai háttér megismerése.
A TDK munka során egy pneumatikus munkahenger egyszerűsített modelljéből kiindulva vizsgálom a PID szabályozásból következő visszacsatolás hatását és a szabályozás stabilitását. A gyakorlatban fellépő egyes nemlinearitásokat fokozatosan hozzáadva, illetve az elméleti- és gyakorlati szempontból érdekes elemeket a modellbe építve közeledek a valós rendszer felé.
A dolgozatban részletesen tárgyalom a vizsgált pneumatikus munkahenger fizikai- és matematikai modelljének analitikus származtatását. Ismertetem a rendszer működése során elképzelhető valamennyi lehetséges állapotát, valamint az egyes nemlinearitások lehetséges forrásait. A modell alapegyenleteinek megadása után elvégzem azok dimenziótlanítását, majd az így nyert egyenletek segítségével megvizsgálom a PID szabályozóval ellátott rendszer stabilitását.
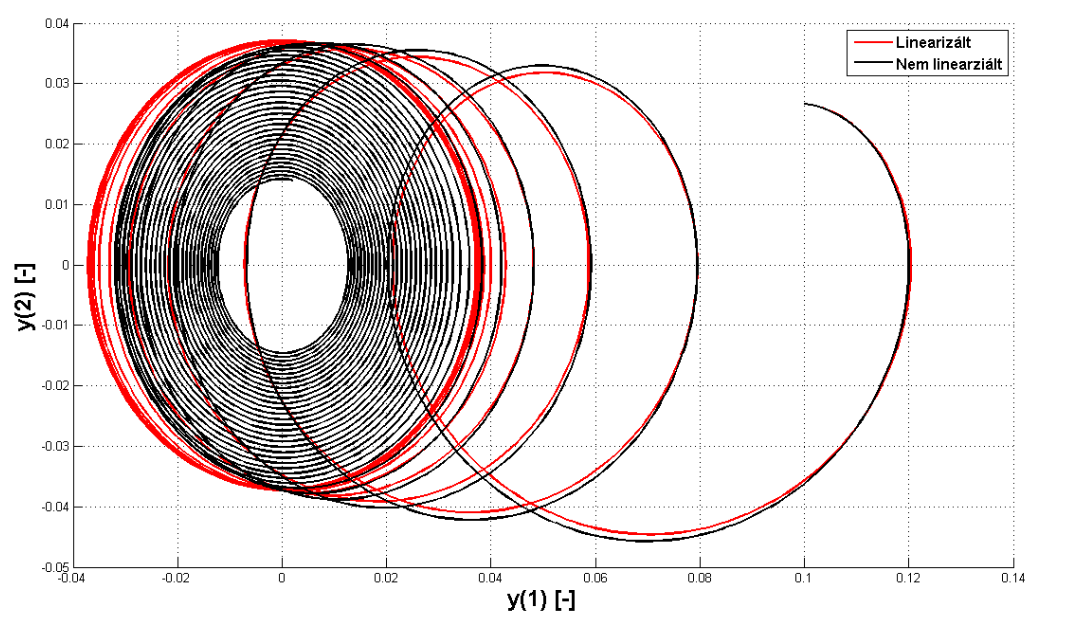
A stabilitásvizsgálatot analitikus számításokra építve, Matlab-ban megírt numerikus szimulációkon keresztül végzem, majd az eredmények alapján elkészítem a modell stabilitási térképeit. A stabilitási térképeken feltűntetem a mérnöki gyakorlatban lényeges stabil- és instabil működési tartományokat, illetve megvizsgálom a P, I és D arányos tagok hatását a szabályozás stabilitására nézve. Megvizsgálom, hogy hogyan viselkedik a nemlineáris rendszer egy adott instabil állapotból kiindulva, illetve az egyensúlyi nyomás változásának függvényében hogyan módosul a linearizált- és a nemlinearizált rendszer egymáshoz viszonyított fázisképe. A stabilitási tulajdonságok tükrében értelmezem a kialakuló rezgési dinamikát az idő függvényében.
Irodalom:
[1] A munkahenger definíciója, felépítése, rendeltetése:
http : //hu.wikipedia.org/wiki/Munkahenger, 2013. 03. 25.
[2] Lajos Tamás: Az áramlástan alapjai, M˝uegyetemi Kiadó, 1998, Azonosító: 450392,
13. fejezet
[3] PID szabályozás:
http : //en.wikipedia.org/wiki/PID_controller, 2013. 04. 30.
[4] A munkahengerben megvalósított PID szabályzó dokumentációja:
http : //www.festo.com/net/SupportPortal/Files/10038/SPC11_ENUS. pdf, 2013. 04. 30.
[5] A munkahenger vezérlőszelepének dokumentációja:
http : //xdki.festo.com/xdki/data/doc_ENUS/PDF/US/MPYE_ENUS.pdf, 2013. 04. 30.