
Gördülő egyensúlyozó deszkán való egyensúlyozás nemlineáris dinamikája a szagittális síkban
Az elmúlt évtizedekben folyamatosan öregedő társadalmunkban egyre gyakoribbá válnak az egyensúlyvesztéssel kapcsolatos balesetek. Évről évre egyre több idős ember kerül kórházba, illetve hal meg hasonló okok következtében. Az egyensúlyozás közbeni stabilitásvesztés legfőbb okai a megnövekedett reakcióidő, a kiszélesedett érzékelési holtsávok, illetve a megfelelő izomerő hiánya az ízületek környékén. A balesetek megelőzhetőek volnának olyan speciális egyensúlyozó képességet fejlesztő terápiákkal, amelyek segítenének megőrizni az egyensúlyozási képességet idős korban is. Rendszeres terápiás gyakorlatok végzése egy egyensúlyozó deszkán ígéretes lehetőségnek tűnik az egyensúlyozó képesség javítására és megőrzésére mind az idősek, mind pedig egyensúlyzavaros betegségekben szenvedők részére.
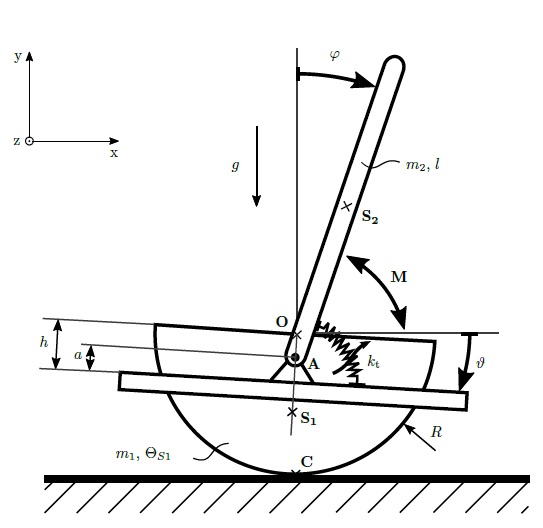
Kutatásom fő témája az egyensúlyozó deszkán való emberi egyensúlyozás közben fellépő nemlineáris dinamikai jelenségek vizsgálata, különös tekintettel a nemlineáris bokamerevségre. Vizsgálataimban fontos szerepet kapott a reakcióidő stabilitásvesztésre gyakorolt hatásának tanulmányozása. Első lépésként megalkottam a deszkán egyensúlyozó ember egyszerűsített mechanikai és matematikai modelljeit. Az erre legalkalmasabb matematikai modellnek a késleltetett differenciálegyenletek rendszere bizonyult. A mozgásegyenleteket a newtoni mechanika elvei alapján írtam fel. A szakirodalomban jól ismert tény, hogy az emberek átlagos bokamerevsége nem elegendően nagy a felső egyensúlyi helyzet stabilizálásához egy helyben állás közben. Ahhoz, hogy a talajon állva egyensúlyozzunk, aktív agyai szabályozás szükségeltetik. Az ilyen jellegű szabályozás egyik legegyszerűbb módja a késleltetett állapotvisszacsatolás alkalmazása. Ez azt jelenti, hogy a bokánál ébredő szabályozó nyomaték arányos az emberi test szöghelyzetével, valamint szögsebességével, pontosabban ezeknek a múltbeli értékével, a reakcióidő figyelembevétele miatt. Összefoglalva, a mechanikai modell egy két szabadsági fokú mechanikai rendszerből és egy bokánál lévő késleltetett késleltetett állapotvisszacsatolásra épülő szabályozóból áll.
A mechanikai és matematikai modellek megalkotása és az egyenletek levezetése után lineáris stabilitásvizsgálatot végeztem a rendszer felső, eredetileg instabil helyzete körül, hogy meghatározzam azokat a kritikus időkéséseket amikor az egyensúlyozó alany elveszti az egyensúlyát. Ehhez az úgynevezett Walton-Marshall módszert használtam, mely a karakterisztikus függvény gyökeinek vizsgálatán alapszik. Végeredményben megkaptam a szabályozó paraméterek függvényében a kritikus időkéséseket, illetve a hozzájuk tartozó belengési frekvenciák közelítő értékeit, melyek közvetlenül a dinamikus stabilitásvesztés után jellemzik a rendszert.
A nemlineáris dinamikai jelenségek vizsgálata során elsősorban a nemlineáris bokamerevségre koncentráltam. Ennek következtében az mozgásegyenletet minden részét linearizáltam az egyensúlyi helyzet körül, a bokamerevséget tartalmazó rész kivételével. A bokamerevség nemlineáris karakterisztikájának meghatározása során irodalomban fellelhető mérési adatokra támaszkodva egy egyszerű két paraméteres trigonometrikus függvényt illesztettem az adatokra.
Egy adott időkéséshez (reakcióidőhöz) létezik egy olyan szabályozási paraméter kombináció mely a rendszer egyensúlyi helyzetbe történő leggyorsabb beállását eredményezi. Ez a kombináció meghatározható analitikusan a karakterisztikus egyenlet egy ötszörös multiplicitású zérushelyének megkeresésével. Ehhez a paraméter kombinációhoz közeli értékeket használtam később a Hopf bifurkáció vizsgálata során, amely a dinamikus stabilitásvesztéskor jelentkezik. Ilyenkor a Hopf bifurkáció eredményeként egy kis amplitúdójú határciklus jön létre az egyensúlyi helyzet közvetlen környezetében. A határciklus amplitudója központi sokaság redukció és a Poincaré–Andronov–Hopf (PAH) tétel segítségével másodrendben közelíthető analitikus módszerekkel és numerikusan is meghatározható a mozgásegyenletek numerikus megoldásával. A numerikus szimulációkat MATLAB környezetben végeztem a beépített megoldók használatával.
Annak érdekében, hogy a az analitikus és numerikus eredményeket könnyen össze tudjam hasonlítani, először az egyhelyben állás egyszerűbb mechanikai modelljét vizsgáltam, hiszen ez a modell csak 1 szabadsági fokú. Az előzetes elvárásoknak megfelelően a két módszerrel meghatározott amplitúdók közel estek egymáshoz, vagyis az analitikus másodrendű közelítés a bifurkációs pont közelében jól közelítette a numerikus megoldást.
Az egyensúlyozás során bekövetkező stabilitásvesztés mögött álló nemlineáris dinamikai jelenségek alaposabb vizsgálata fejlettebb terápiás eszközök (mint például a jelen egyensúlyozó deszka) kifejlesztéséhez jelenthet fontos alapot, melyek jelentős segítséget nyújthatnak az egyensúlyzavarral élőknek. Az időkésés és egyensúlyvesztés kapcsolatának alaposabb tanulmányozása az emberi központi idegrendszer működésének megértéséhez is hozzájárulhat.
szerző
-
Rózsa Dániel
Gépészeti modellezés mesterképzési szak
mesterképzés (MA/MSc)

konzulens
-
Molnár Csenge Andrea
doktorandusz, Műszaki Mechanikai Tanszék