
Daniel egyensúlyoz: egy humanoid robot dinamikája
Daniel, a humanoid robot ötlete 2014-ben született meg. Célom az volt, hogy egy egyedi, saját tervezésű, kutatási célra szánt humanoid robotot építsek. Az elsődleges szempont a kutatásra való alkalmasság volt, e mellett a konkurens robotokhoz képest több szabadságfokot szerettem volna, annak érdekében, hogy komplexebb kísérletek végrehajtására alkalmas legyen.
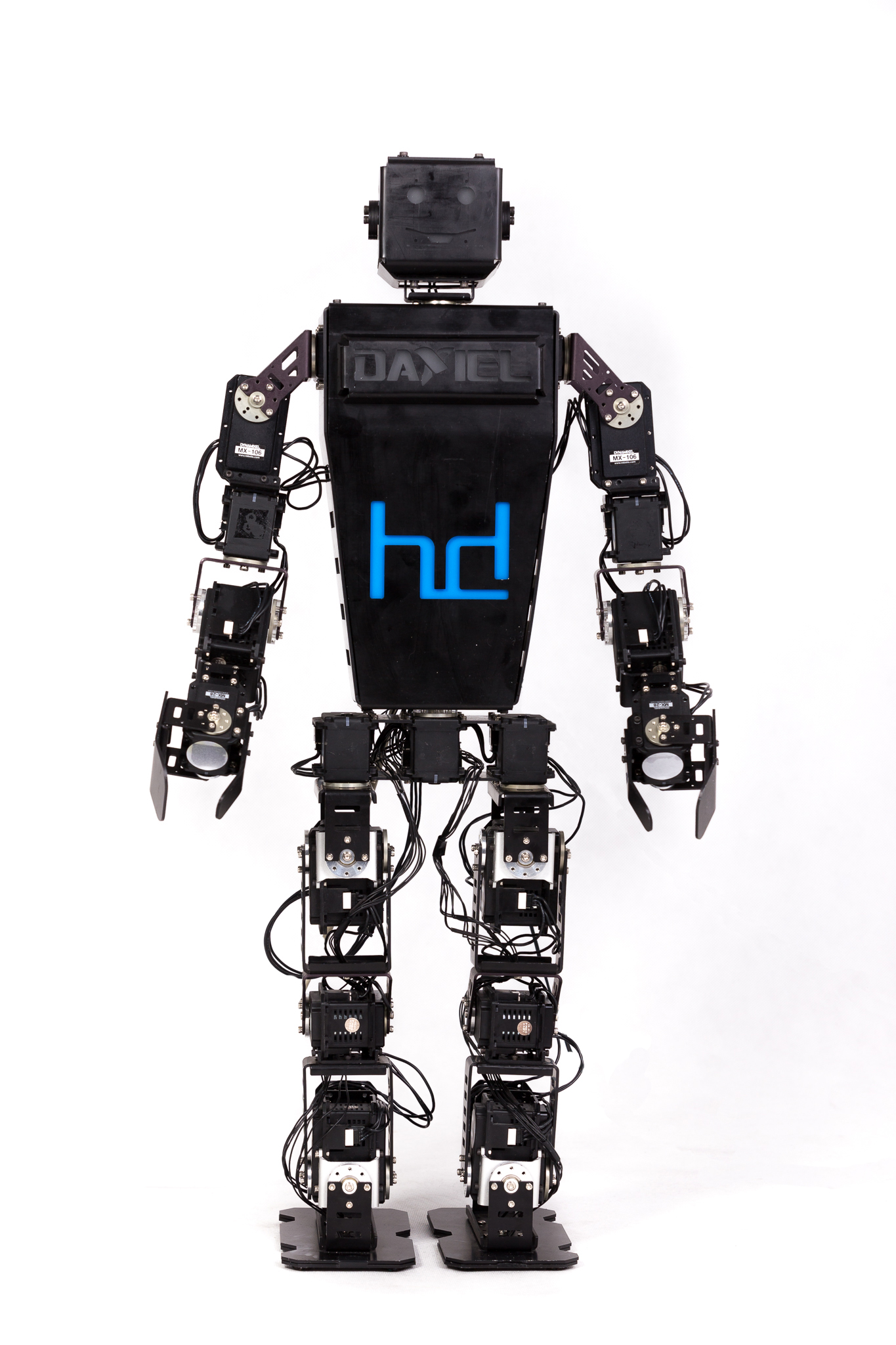
Több, mint 2 év tervezést, fejlesztést és gyártást követően a humanoid robot lényegében elkészült. Közel 70cm magas, 6kg tömegű és 25 szabadsági fokkal rendelkezik. A vázát egyedi alumínium szerkezet alkotja, amely több helyen is csapágyas szerkezettel van megtámogatva.
A testében található egy számítógép és egy saját tervezésű elektronikai áramkör, amely gondoskodik a rendszer áramellátásáról, az aktuátorok és szenzorok csatolásáról. Minden számítás, érzékelés, vezérlés és szabályzás a roboton belül zajlik, így autonóm robotként használható.
Egy szoftveres keretrendszert készítettem a robot számára, ami könnyen és gyorsan használható modulokat, függvényeket tartalmaz, amelyek univerzálisan felhasználhatók.
Daniel, a humanoid robot elkészítése közben már felvetődött, milyen feladatot oldjon meg, ami kutatási szempontból is érdekes. Olyan területet szerettem volna megjelölni, amely aktuális, nem kézenfekvő és valós felhasználási vonatkozással, továbbfejlesztési lehetőséggel is rendelkezik. Így esett a választásom a dinamikus egyensúlyozásra.
Az aktív dinamikus egyensúlyozás a humanoid robot esetén rendkívül fontos, viszont még napjainkban sem triviális feladat. Daniel az emberhez hasonló módon igyekszik kiegyensúlyozni magát az oldalról érkező behatásokkal szemben. Egyszerűsített dinamikai modell alapján kapott differenciálegyenleteket és PID szabályzást használok ennek eléréséhez. A dolgozatomban bemutatom a kétlábon és az egylábon való egyensúlyozás elméleti és gyakorlati megvalósítását. A későbbiekben ezeket az a tapasztalatokat szeretném felhasználni egy dinamikus járásalgoritmus elkészítéséhez.
Szakirodalom:
[1] Stépán Gábor, Delay effects in the human sensory system during balancing, Phil. Trans. R. Soc. A 367 pp. 1195-1212 (2009)
[2] Dr. Csernák Gábor, Dr. Stépán Gábor, A műszaki rezgéstan alapjai, Budapesti Műszaki és Gazdaságtudományi Egyetem Műszaki Mechanikai Tanszék (2012)
[3] Eniko Enikov, Stépán Gábor, Stabilizing an inverted pendulum – alternatives and limitations, Periodica Polytechnica Ser. Mech. Eng. Vol. 38, NO. 1, pp. 19-26 (1994)
szerző
-
Hegyesi Donát Sándor
Mechatronikai mérnöki alapszak (BSc)
alapképzés (BA/BSc)

konzulens
-
Dr. Stépán Gábor
egyetemi tanár, Műszaki Mechanikai Tanszék