
Falazóelemek kialakítása Robot Oriented Design személete alapján
Az automatizáció az elmúlt évtizedek során világszerte megváltoztatta a legtöbb
iparágat. Ennek a folyamatnak a segítségével csökkenthető az emberi munkaigény,
precízebbé válhat a gyártás, valamint csökkenthető a selejt, valamint a hulladék
mennyisége. Összességében olcsóbbá és gyorsabbá válhat a gyártás folyamata. Az
építőiparban mindezen előnyök ellenére sem sikerült széleskörben elterjeszteni ezeket
a technológiákat, feltételezhetően az építőipar sajátosságaink, egyedi kihívásainak
köszönhetően. Az is belátható, hogy az építőipar mai legnagyobb kihívásai a
munkaerőhiány, magas baleseti kockázat és részben ezek következtében végbemenő
folyamatos drágulás szükségessé teszik az automatizálást.
A „Robot Oriented Design” elmélete a lehető legjobb eredmények elérése érdekében
azzal a céllal jött létre, hogy az automatizált ipari folyamatok (és ezek termékeinek)
tervezése során a gyártáshoz alkalmazott eszközök (robotok) működési jellege a
lehető legnagyobb mértékben kerüljön figyelembevételre.
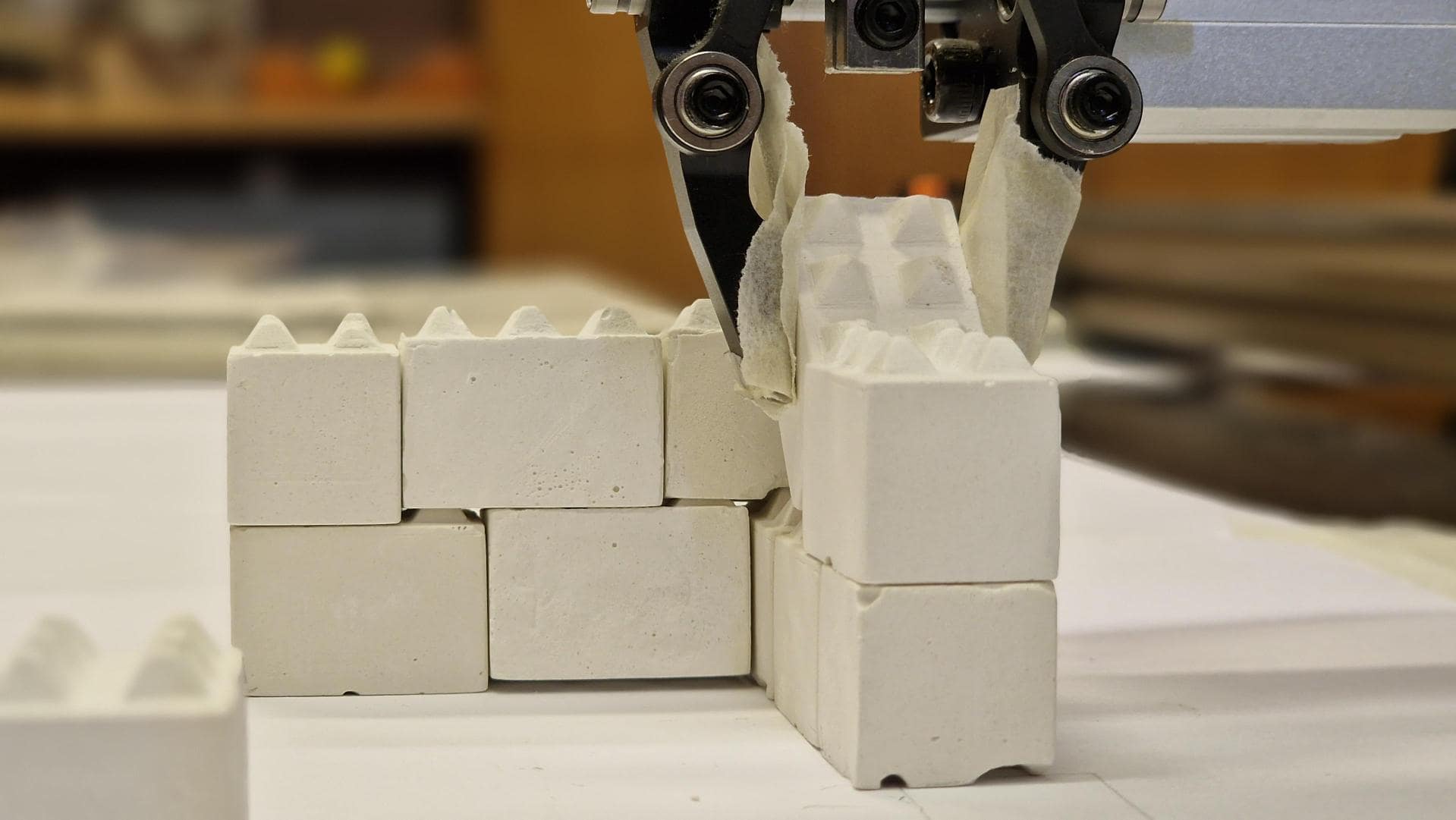
Ennek a kutatásnak célja olyan, a Robot Oriented Design elmélete szerint kialakított
falazó elemek előnyeinek vizsgálata, amely a robotkarral történő falazás során a
nagyobb elhelyezési pontosságot tesz lehetővé. Ez megalapozhatja az ilyen építőelem
rendszerekkel kapcsolatos további kutatásokat. A kevés fellelhető szakirodalom okán
ezt a vizsgálatot a jelenleg piacon lévő elemek tanulmányozásával és több kis
mértékben eltérő geometriájú elem tesztelésével hajtom végre. Összehasonlítási
alapként szolgál majd egy ugyanolyan méretekkel rendelkező, de passzív pozicionáló
elemeket nem tartalmazó falazó elem.
A vizsgálatok laboratóriumi körülmények között, 1:15-ös méretarányú falazó elemekkel
zajlanak. A kísérletek végzéséhez sínnel ellátott Dobot Magician asztali robotkar és
az ehhez tartozó programozási környezetet szolgál eszközül.
Irodalom:
Bock T 1988 Robot-Oriented Design. Proc. The 5th International Symposium on
Robotics in Construction,June 6-8, Tokyo, Japan pp 135-144
J. Andres, T. Bock, F. Gebhart, W. Steck, First results of the development of the
masonry robot system ROCCO: a fault tolerant assembly tool. 11th International
Symposium on Automation and Robotics in Construction (ISARC) pp 87-93 1994
https://doi.org/10.1016/B978-0-444-82044-0.50016-3
G. Pritschow. et al. Technological aspects in the development of a mobile bricklaying
robot. (Automation in Construction Vol 5) pp 3-13. 1996 https://doi.org/10.1016/0926-
5805(95)00015-1
T. Bock, T. Linner. Robot-oriented Design. Design and Management Tools for the
Deployment of Automatioin and Robotics in Construction. Cambridge University Press,
2015. https://doi.org/10.1017/CBO9781139924146
M. J.Skibniewski, S. C. Wooldridge, “Robotic materials handling for automated
building construction technology”, Automation in Construction Vol.1 (1992) pp 251-
266 https://doi.org/10.1016/0926-5805(92)90017-E
szerző
-
Koczkás János
Építészmérnöki mesterképzési szak osztatlan
egységes, osztatlan képzés

konzulens
-
Dr. Vidovszky István
egyetemi docens, Építéstechnológia és Építésmenedzsment Tanszék